
 danny wang
a136536ff5
watchrobot first commit
danny wang
a136536ff5
watchrobot first commit
|
2 年之前 | |
|---|---|---|
| .. | ||
| README.md | 2 年之前 | |
| hwdef-bl.dat | 2 年之前 | |
| hwdef.dat | 2 年之前 | |
| kakutef7.jpg | 2 年之前 | |
| kakutef7_AIO.jpg | 2 年之前 | |
{kind=link}
{kind=link}
README.md
KakuteF7 AIO Flight Controller
http://www.holybro.com/product/59
The KakuteF7 AIO is a flight controller produced by Holybro.
Features
- STM32F745 microcontroller
- ICM20689 IMU
- BMP280 barometer
- microSD card slot
- AT7456E OSD
- 6 UARTs
- 6 PWM outputs
Pinout
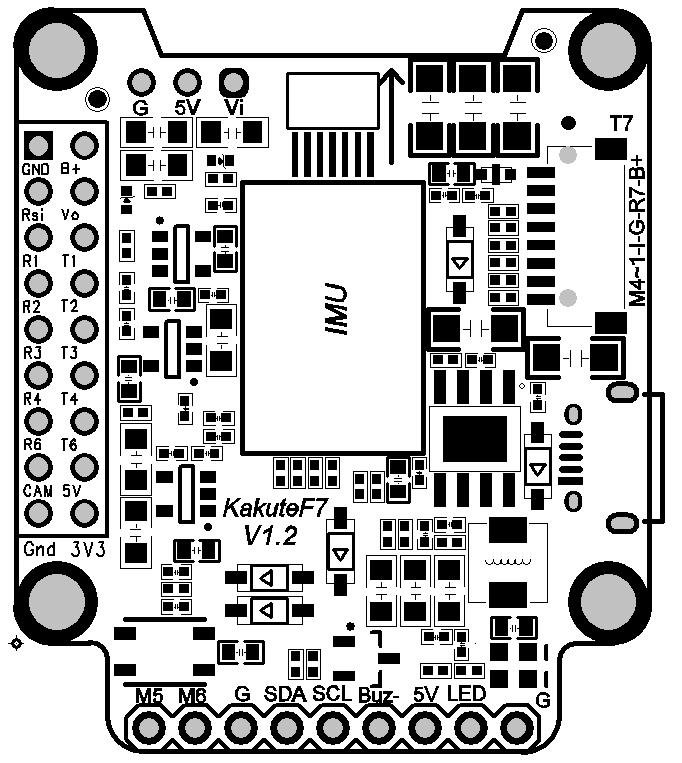
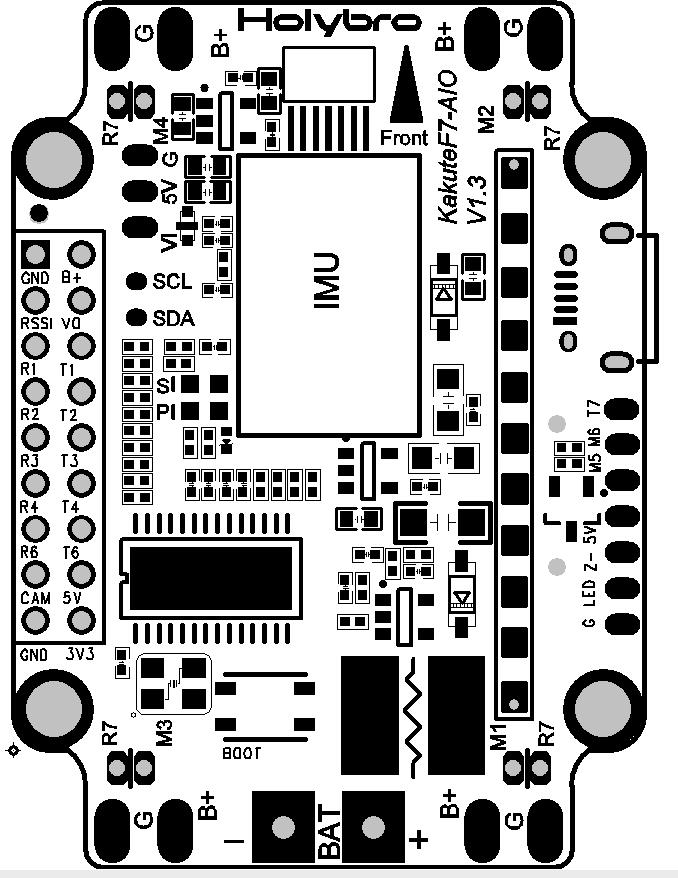
The KakuteF7 comes in two varients. One is an AIO (All-In-One) board, with OSD. The other is a smaller board without OSD.
KakuteF7 Pinout
KakuteF7 AIO Pinout
UART Mapping
The UARTs are marked Rn and Tn in the above pinouts. The Rn pin is the receive pin for UARTn. The Tn pin is the transmit pin for UARTn.
- SERIAL0 -> USB
- SERIAL1 -> UART1 (Telem1)
- SERIAL2 -> UART2 (Telem2)
- SERIAL3 -> UART3 (GPS)
- SERIAL4 -> UART4
- SERIAL5 -> UART7
- SERIAL6 -> UART6 (Transmit only, FrSky)
The SERIAL5 port (UART7) is for ESC telemetry, and has a R7 pad on each of the four corners of the KakuteF7 AIO board.
RC Input
RC input is configured on the R6 (UART6_RX) pin. It supports all RC protocols.
FrSky Telemetry
FrSky Telemetry is supported using the T6 pin (UART6 transmit). You need to set the following parameters to enable support for FrSky S.PORT
- SERIAL6_PROTOCOL 10
- SERIAL6_OPTIONS 7
OSD Support
The KakuteF7 AIO supports OSD using OSD_TYPE 1 (MAX7456 driver).
PWM Output
The KakuteF7 supports up to 6 PWM outputs. The pads for motor output M1 to M6 on the above diagram are for the 6 outputs. All 6 outputs support DShot as well as all PWM types.
The PWM is in 3 groups:
- PWM 1, 2 and 3 in group1
- PWM 4 and 5 in group2
- PWM 6 in group3
Channels within the same group need to use the same output rate. If any channel in a group uses DShot then all channels in the group need to use DShot.
Battery Monitoring
The board has a builting voltage and current sensor. The current sensor can read up to 130 Amps. The voltage sensor can handle up to 6S LiPo batteries.
The correct battery setting parameters are:
- BATT_MONITOR 4
- BATT_VOLT_PIN 13
- BATT_CURR_PIN 12
- BATT_VOLT_MULT 10.1
- BATT_AMP_PERVLT 17.0
Compass
The KakuteF7 AIO does not have a builting compass, but you can attach an external compass using I2C on the SDA and SCL pads.
Loading Firmware
Initial firmware load can be done with DFU by plugging in USB with the bootloader button pressed. Then you should load the "with_bl.hex" firmware, using your favourite DFU loading tool.
Once the initial firmware is loaded you can update the firmware using any ArduPilot ground station software. Updates should be done with the *.apj firmware files.