danny wang
a136536ff5
watchrobot first commit
danny wang
a136536ff5
watchrobot first commit
|
%!s(int64=2) %!d(string=hai) anos | |
|---|---|---|
| .. | ||
| avr | %!s(int64=2) %!d(string=hai) anos | |
| nuttx | %!s(int64=2) %!d(string=hai) anos | |
| socketcan | %!s(int64=2) %!d(string=hai) anos | |
| stm32 | %!s(int64=2) %!d(string=hai) anos | |
| README.md | %!s(int64=2) %!d(string=hai) anos | |
| libuavcan_vs_libcanard_arch.png | %!s(int64=2) %!d(string=hai) anos | |
{kind=link}
README.md
Libcanard Drivers
This directory contains implementations of platform-specific components for Libcanard. Each sub-directory contains (or should contain) a dedicated README file with driver specific documentation.
Porting Guide
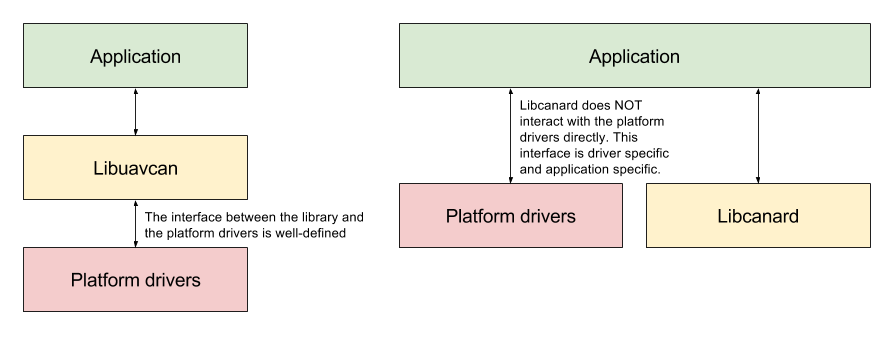
Existing drivers should be used as a reference for implementation of one's own custom drivers. Libcanard does not interact with the underlying platform drivers directly, but does so via the application. Therefore, there is no need in a dedicated porting guide. This is unlike Libuavcan, which is more complex and does have a well-defined interface between the library and the platform.